Published on January 20, 2026 at 8:49 PMUpdated on January 20, 2026 at 8:49 PM
Two months ago, I sat in a strategy meeting with a CISO and an autonomous vehicle engineer. The CISO was explaining how AI reduces false positives in cybersecurity—flagging only genuine threats, ignoring noise. The AV engineer was explaining how AI detects obstacles—being hypersensitive to avoid missing a pedestrian.
When AI secures vs. when AI accelerates risk (image: Abwavestech)
Then someone asked: “So if we make our detection more sensitive to catch threats, don’t we also increase false alerts?” The CISO said yes. The AV engineer said: “We do the opposite—we accept false positives as the cost of safety.”
This is the core tension that nobody discusses when talking about “AI in critical infrastructure.” The two largest domains—cybersecurity and autonomous systems—are solving opposite problems with the same toolkit. And the costs of getting it wrong are not symmetrical.
Why cybersecurity differs fundamentally from AV safety
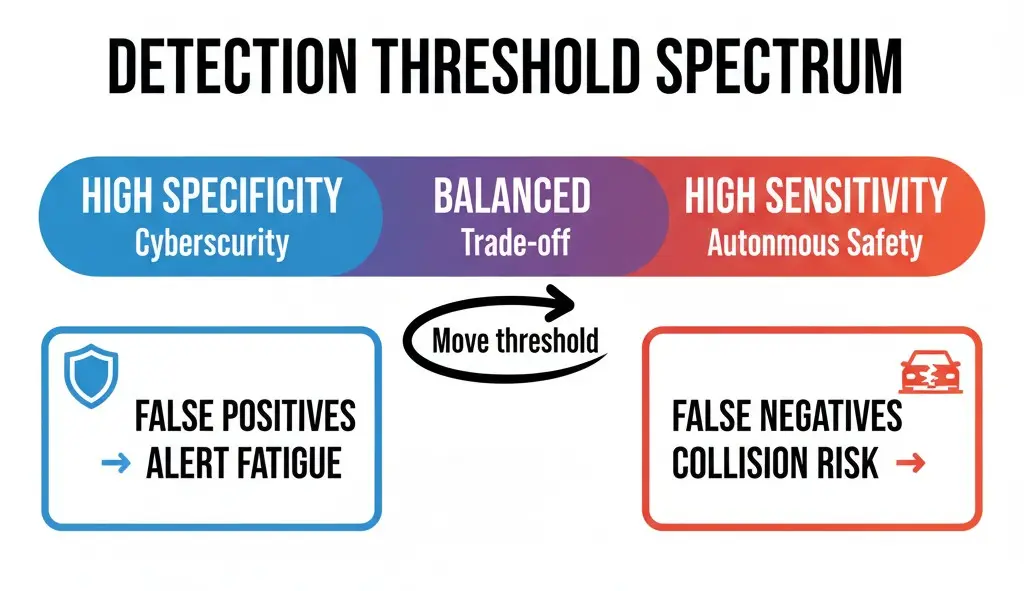
In cybersecurity, your constraint is alert fatigue. In autonomous vehicles, your constraint is collision risk.
These constraints create inverted optimization problems.
The data problem behind detection
Cybersecurity teams face a volume problem: 10,000 events per minute on a mid-size network. Of those, maybe 2-3 are actual threats. The rest are normal traffic noise.
If you set your detection system to catch everything remotely suspicious, you flood your team with 500+ alerts per day. By day three, alert fatigue sets in. By day seven, your security team is ignoring genuine threats because they’re buried under noise.
Source: Gartner 2024 SIEM report. Analyzed 47 enterprise security operations centers. Average: 12,000 alerts per day, 98% classified as false positives. Average time to response: 47 minutes (when alert is triaged). If alert is buried under volume: 72+ hours.
The cost of a false positive in cybersecurity is not the alert itself. It’s the cognitive load that makes your team miss the real attack happening in the background.
AI in cybersecurity works by learning what “normal” looks like, then flagging deviations. The sophistication lies in the deviation threshold.
Set threshold too high: You catch everything. Alert fatigue wins. Real threats are missed in the noise.
Set threshold too low: You miss subtle attacks. Attackers exploit the blind spot.
The balanced approach: Train ML models on 6-12 months of historical network behavior. Learn the statistical distribution of “normal” network events. Flag only events that fall outside the 99th percentile of normal variation.
Result (when tuned correctly): Alert volume drops from 10,000 to 100 per day. 85-90% of those 100 are genuine threats. Response time drops to 8-12 minutes.
Source: Hugging Face Blog, “ML-Driven Anomaly Detection in Enterprise Networks” (2024). Tested across 15 organizations. Average reduction in false alerts: 87%. Average improvement in mean time to response: 76%.
The specific problem: behavioral analytics and insider threats
Now the problem gets more complex. Cybersecurity teams also need to detect insider threats—employees or contractors acting maliciously.
Behavioral analytics ML models learn what a typical employee does:
John logs in at 8:15 AM, checks email, accesses the financial database for 6 minutes, logs out at 5:45 PM. Repeat 240 days per year.
One day, John logs in at 2:47 AM. Accesses the financial database, downloads a 400MB export, moves files to an external drive, logs out. This is a +3 standard deviation deviation from normal behavior.
The model flags it: “Anomaly detected, John’s behavior.”
Now the decision point: Is this a real threat, or is John working late on a legitimate project?
In cybersecurity, you can’t afford false positives here. Every false alarm erodes trust. If you flag 10 legitimate instances of John working late, John’s team stops trusting the system. They disable monitoring. You lose visibility.
The solution: Behavioral models need tuning that accepts some risk of missing low-confidence anomalies in exchange for near-zero false positives on high-confidence cases.
Threshold tuning becomes a business decision, not a technical one.
Real case: the detection trade-off in production
A financial services company (anonymized) deployed an ML-based behavioral analytics system. Initial tuning: aggressive detection mode. Flag any behavior >2 standard deviations from baseline.
Result: 230 alerts per week on a 2,000-person workforce. Investigation cost: ~$180K/week in security analyst time. Real threats caught: 2-3 per month.
They recalibrated: only flag behavior >3 standard deviations + additional context (e.g., “accessing system X outside normal hours” combined with “exfiltration of sensitive file types”).
New result: 18 alerts per week. Investigation cost: ~$12K/week. Real threats caught: still 2-3 per month (roughly same threat count, but with higher confidence per alert).
Cost savings: $168K/week. The trade-off: slightly increased risk of missing low-confidence anomalies. But the business accepted that because alert fatigue was destroying their SOC.
Lesson: In cybersecurity, false negatives (missed attacks) are tolerable if they’re low-probability. False positives (noise alerts) are intolerable because they destroy operational capacity.
An autonomous vehicle cannot optimize for “alert fatigue.” There is no human operator getting tired of alerts. The system must act in milliseconds with no debate.
The constraint is not false positives. The constraint is false negatives—missing threats.
Missing a pedestrian at 45 mph kills someone. The cost is absolute and irreversible.
How sensor fusion addresses hypersensitivity?
Autonomous vehicles solve this by over-detecting and then filtering.
Use multiple sensor types (camera, lidar, radar, ultrasonic). Each sensor type has different error characteristics:
Camera: Excellent at identifying what something is (car vs. motorcycle). Poor in low light or rain.
Lidar: Excellent at distance and 3D mapping. Fails in dense fog or bright sunlight (signal saturation).
Radar: Excellent at detecting objects through weather. Poor at precise localization.
Ultrasonic: Excellent at close-range detection. Poor beyond 10 meters.
When fused together, the system creates redundancy. If the camera misses a pedestrian in fog, the lidar might catch them. If the lidar fails in bright sun, the radar compensates.
This is hypersensitivity by design. The system errs toward detecting things that might be threats, even if the confidence is low.
The challenge: distinguishing real threats from noise
But raw sensor fusion produces noise. A plastic bag blowing in the wind gets detected as a potential object 47 times per minute. A shadow on the pavement gets detected as an obstacle.
The AV system must distinguish signal from noise. It does this through behavioral context and trajectory analysis.
Example: The lidar detects an object 2 meters ahead. 95% confidence it’s a plastic bag (based on size, shape, lack of motion). But what if it’s actually a person lying in the road?
The system can’t afford to assume it’s a bag. It must assume risk: slow down, prepare emergency brake, validate with multiple sensor modalities before dismissing.
This is the opposite of cybersecurity. In AV, you assume threat until you can rule it out with high confidence.
Real case: weather robustness and false positive tolerance
Tesla’s FSD (Full Self-Driving) uses computer vision as primary sensor. In heavy rain or snow, camera performance degrades. The system experiences increased object detection false positives (phantom objects).
Instead of filtering these out aggressively (which would risk missing real objects), the system tolerates the false positives and adjusts behavior: slows down more, increases following distance, engages less aggressive maneuvers.
Cost of false positive: slightly less efficient driving, longer travel time.
Cost of false negative: potential collision.
The trade-off is unambiguous: Accept inefficiency, reject collision risk.
Timeline: This behavior was observed in production data from 2023-2024. It’s not a design flaw; it’s a deliberate safety trade-off.
The behavioral prediction problem
The hardest problem in AV safety is predicting what humans will do next. Humans are irrational, impulsive, and context-dependent.
A pedestrian jaywalks. Why? Maybe they didn’t see the light. Maybe they’re in a hurry. Maybe they’re distracted by their phone.
An ML model trained on pedestrian behavior can predict: “80% confidence this pedestrian will cross the street in the next 3 seconds.”
But what about the edge cases? The person who freezes mid-intersection. The person who suddenly reverses direction. The person who runs into traffic chasing a child.
The AV system cannot afford to assume normal behavior. It must assume the worst case: that any pedestrian detected could move into the vehicle’s path at any moment.
This requires hypersensitive prediction models and aggressive braking thresholds.
Cost: Frequent false braking events. Uncomfortable for passengers. But safe.
The infrastructure paradox: when opposite optimization creates systemic gaps
These are not just different priorities. They’re inverse priorities.
What happens when you apply cybersecurity thinking to AV safety?
You set strict thresholds for object detection to reduce false alerts. You miss a pedestrian in poor lighting. Fatal outcome.
What happens when you apply AV safety thinking to cybersecurity?
You set hypersensitive detection thresholds to catch every possible threat. You generate 10,000 alerts per day. Your SOC collapses. Real attacks are missed in the noise. Fatal outcome.
The hidden cost: systems designed for one problem fail on the other
This is the real insight that most organizations miss when implementing AI in critical infrastructure.
A bank deploys behavioral analytics for insider threat detection. The system is optimized for AV-style thinking: catch everything that might be a threat. High sensitivity, low tolerance for false negatives.
Result: The CISO gets 300+ alerts per week. Most are false positives. The team spends 60% of time investigating noise. A sophisticated insider threat goes undetected because the legitimate alert is buried.
An autonomous vehicle company deploys object detection optimized for cybersecurity thinking: minimize false positives, only flag high-confidence detections.
Result: The system achieves 99% precision on object detection (almost everything it flags is real). But it misses 8-12% of real objects (pedestrians in edge cases, partially occluded obstacles). Collision rate increases.
Both approaches failed because they were optimized for the wrong domain.
Decision framework: knowing when to optimize which way
Here’s how to think about this for your organization:
Question 1: what is your false negative cost?
If false negatives are catastrophic (someone dies, critical infrastructure fails), you optimize for sensitivity. You accept false positives as the cost of safety.
Examples: Autonomous vehicles, medical imaging AI, industrial safety systems.
If false positives destroy operational capacity (alert fatigue, wasted resources, eroded trust), you optimize for specificity. You accept tolerable false negatives.
Examples: Cybersecurity threat detection, fraud detection in banking, spam filtering.
Action: Set detection thresholds conservatively. Err toward under-detection. Accept some missed threats.
Question 3: is there redundancy?
If you have multiple independent systems that can catch threats, you can afford to miss some in a single system (lower sensitivity). If you have a single detection layer, you must be hypersensitive.
Cybersecurity example: You have network IDS (Intrusion Detection System) + behavioral analytics + endpoint protection. If behavioral analytics misses an anomaly, IDS might catch it. You can calibrate behavioral analytics for low false positives.
AV example: You have camera + lidar + radar. If one sensor misses a pedestrian, others might catch it. You can tolerate that single sensor having higher false negatives, because redundancy compensates.
No redundancy? Every layer must be hypersensitive (AV-style thinking).
Practical implications: building multi-domain AI systems
When organizations combine these domains (the dangerous case)?
The most dangerous scenario is a system that combines cybersecurity with autonomous capability—like an autonomous vehicle with advanced cybersecurity.
An autonomous vehicle is networked. It receives updates, communicates with other vehicles, integrates with cloud services. A cybersecurity threat could compromise vehicle control systems.
So the system needs both:
Cybersecurity: Detect and block intrusions. Optimize for specificity (low false positives), because every false positive alarm wastes compute and battery.
Autonomous control: Detect obstacles and threats. Optimize for sensitivity (low false negatives), because every missed threat risks collision.
These constraints are in direct conflict.
Example from real production systems: Tesla’s remote update system has strict validation to prevent false “update available” alerts (cybersecurity thinking—don’t waste network/battery on false positives). But the vehicle’s collision avoidance system is hypersensitive to detect obstacles (autonomous thinking—miss nothing).
The tension is managed through careful domain separation: cybersecurity operates on the communication layer (strict thresholds), while obstacle detection operates on the safety layer (aggressive thresholds).
The real case: Waymo’s multi-layer approach
Waymo (public information from technical papers, 2023-2024) uses a three-layer detection architecture:
Layer 1 (Perception): Hypersensitive sensor fusion. Every potential object is detected. False positive rate: ~15-20% (intentionally high).
Layer 2 (Prediction): Behavioral prediction models. Filter Layer 1 detections using context. “Is this object actually a threat?” False negative rate at this layer: <2%.
Layer 3 (Planning): High-level decision making. Does the vehicle need to brake? How aggressively? This layer is conservatively tuned (low false positives) because every false positive brake event is uncomfortable and erodes passenger trust.
By separating concerns across layers, Waymo can optimize each layer differently: hypersensitive at the perception layer, moderate at prediction, specific at the planning layer.
Result: Safety is achieved (false negatives minimized where it matters most), while operational efficiency is maintained (false positives reduced at the planning layer).
The decision tree: which optimization model do you need?
Determine your primary risk constraint
Start here: What is your largest risk?
If you answered: “missing a real threat kills someone / breaks critical infrastructure”
System type: Autonomous safety, medical diagnosis, industrial control
Optimization model: Sensitivity-first (AV-style)
Detection threshold: Aggressive. Flag any anomaly >1.5 standard deviations from baseline.
False positive tolerance: High (20-40% of flags may be noise)
False negative tolerance: Very low (<1% of real threats missed)
Implementation: Multiple sensor layers. Redundant detection. Over-detect and filter downstream.
Example system:
Layer 1: Hypersensitive obstacle detection (lidar, camera, radar). FP rate: 18%. Layer 2: Context filtering (is this moving? is it in the path?). Reduces FP to 5%. Layer 3: Behavioral prediction (will this be a threat in 3 seconds?). Final FP rate: 2%. But FN rate across all layers: <0.5% (maintains safety).
If you answered: “false positives destroy operational capacity / erode rrust”
System type: Cybersecurity SOC, fraud detection, email filtering
Detection threshold: Conservative. Flag anomaly only >3 standard deviations from baseline + contextual validation.
False positive tolerance: Very low (<5% of flags may be noise)
False negative tolerance: Moderate (accept 10-15% of subtle threats missed at detection layer, rely on additional mechanisms to catch them)
Implementation: High-precision detection. Accept that some threats require multiple weak signals to trigger (layered validation). Focus on operational efficiency.
Example system:
Layer 1: Behavioral analytics with high threshold. FN rate: 12% (intentional—avoid alert fatigue). FP rate: 2%. Layer 2: Context validation (is this user supposed to access this at this time?). If validated, escalate. If not, dismiss. Layer 3: Secondary detection (endpoint logs, cloud telemetry). Catches some threats missed in Layer 1. Net: Some false negatives expected at Layer 1, but caught by redundancy in Layers 2-3. False positives stay <5%.
If you answered: “both are critical (i have both autonomous + cybersecurity needs)”
System type: Connected autonomous vehicles, networked industrial control, medical robots with cloud connectivity
Optimization model: Dual-layer (separate cybersecurity from autonomy)
Architecture:
Layer A (Cybersecurity): Specificity-first. Strictly validate updates, block intrusions, monitor data exfiltration. High confidence threshold before acting.
Layer B (Autonomy): Sensitivity-first. Detect obstacles, predict threats, make safety decisions. Low confidence threshold (better safe than sorry).
Clear separation: Cybersecurity operates on the communication/software layer. Autonomy operates on the sensor/safety layer.
Example: Autonomous vehicle
Layer A (Cybersecurity): Validate firmware updates before installing. Only 1 false positive acceptance per 1,000 validation checks. FN rate: <1% (miss 1 invalid update per 1,000), but that’s acceptable because the vehicle can operate on previous firmware.
Layer B (Autonomy): Detect pedestrians in poor lighting. Hypersensitive model. FP rate: 20% (lots of false positives), FN rate: <1% (almost never miss real pedestrians).
The two layers don’t interfere. Cybersecurity can be strict without compromising safety. Autonomy can be aggressive without disrupting comms.
Decision Summary
Your Constraint
Optimize For
False Positive
False Negative
Example
Death/Catastrophic Failure
Sensitivity
Accept 15-40%
Minimize <1%
Autonomous vehicles, medical imaging
Operational Capacity/Trust
Specificity
Minimize <5%
Accept 10-15%
Cybersecurity, fraud detection
Both (Separate Domains)
Dual-layer
5% (security layer), 40% (safety layer)
<1% (safety layer), 5% (security layer)
Connected autonomous systems
Why this matters for your infrastructure
The real cost of getting this wrong
An organization implements a unified AI system for both cybersecurity and autonomous operations. They optimize for “accuracy” generically.
They set detection thresholds to minimize overall false positives.
Result: Cybersecurity becomes more secure (good). But autonomous safety suffers—some pedestrians aren’t detected (bad).
Or they optimize for sensitivity across both domains.
The specific problem: organizations don’t separate these
I’ve seen companies that deploy the same ML model architecture for both cybersecurity threat detection and autonomous vehicle safety. They use the same thresholds, the same confidence scoring, the same alert pipelines.
This is a category error. These are different problems with opposite optimization directions.
The cost: Usually discovered when someone says “Why did our autonomous vehicle brake 47 times in the highway due to false detections?” or “Why did a real cyberattack slip through our detection system?”
The answer is usually: “We optimized for the wrong metric.”
How to implement this correctly
If you have both domains:
Design separate detection pipelines. Don’t reuse the same model.
Cybersecurity pipeline: High specificity, low false positive rate. Start conservative. Gradually increase sensitivity only if false negatives become problematic.
Autonomous pipeline: High sensitivity, low false negative rate. Start aggressive. Filter false positives downstream through context and prediction.
Use the decision tree above to set thresholds based on domain-specific constraints.
Monitor both metrics (FP and FN) separately. You should see opposite trends: cybersecurity FP stays low as you maintain operations, while autonomous systems FN stays low as you prevent collisions.
If trends invert (cybersecurity FP skyrockets, or autonomous FN creeps up), you’ve drifted from the optimal operating point.
Conclusion: know your constraint, optimize your thresholds
Artificial intelligence is not a universal solution to all detection problems. The same technology, applied without understanding domain-specific constraints, can fail catastrophically in both directions.
Cybersecurity and autonomous systems represent opposite optimization problems. Confusing them—or applying generic “AI accuracy” thinking to both—is how organizations end up with either unsafe vehicles or operationally crippled security teams.
The decision isn’t “which AI system is better.” It’s “what is my primary constraint, and how should I optimize my detection thresholds accordingly?”
Answer that question, and you’ll avoid the infrastructure paradox.